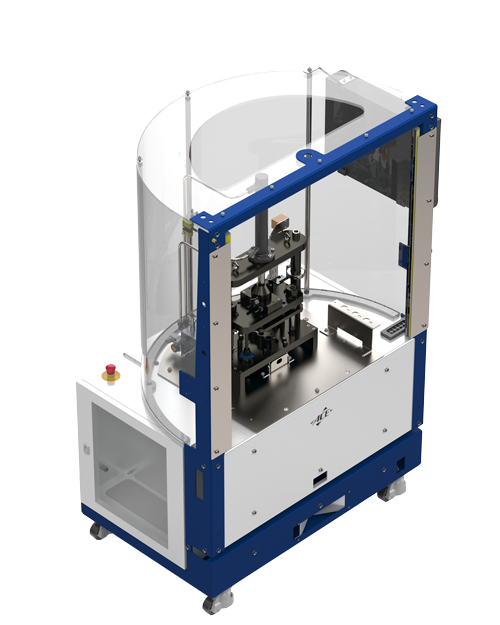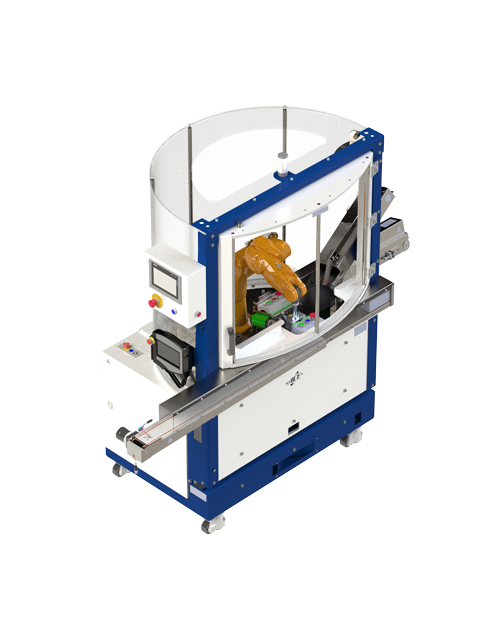
Conçu à partir de composants présents dans l’industrie, il permet d’effectuer une immersion totale dans le monde industriel.
Ce système permet l’apprentissage et l’approfondissement des technologies :
- De communication
- De détection
- La robotique collaborative
- La sécurité machine
- L’optimisation des flux de production
Appréhender l’intégration d’un système en périphérie machine en établissant la liaison avec le process